想了解Go内置类型的内存布局的契机,是一次在调试“不同类型的小对象频繁创建对gc性能的影响”时发现map的gc性能不佳,而作为对比的包含slice的struct却很好。这里总结Go runtime里map的实现,可以解释这个问题。
hash table内部结构
Go的map就是hashmap,源码在src/runtime/hashmap.go。对比C++用红黑树实现的map,Go的map是unordered map,即无法对key值排序遍历。跟传统的hashmap的实现方法一样,它通过一个buckets数组实现,所有元素被hash到数组的bucket中,buckets就是指向了这个内存连续分配的数组。B字段说明hash表大小是2的指数,即2^B。每次扩容会增加到上次大小的两倍,即2^(B+1)。当bucket填满后,将通过overflow指针来mallocgc一个bucket出来形成链表,也就是为哈希表解决冲突问题。
1 | // A header for a Go map. |
1 | // A bucket for a Go map. |
上图是一个bucket的数据结构,tophash是个大小为8(bucketCnt)的数组,存储了8个key的hash值的高八位值,在对key/value对增删查的时候,先比较key的hash值高八位是否相等,然后再比较具体的key值。根据官方注释在tophash数组之后跟着8个key/value对,每一对都对应tophash当中的一条记录。最后bucket中还包含指向链表下一个bucket的指针。内存布局如下图。
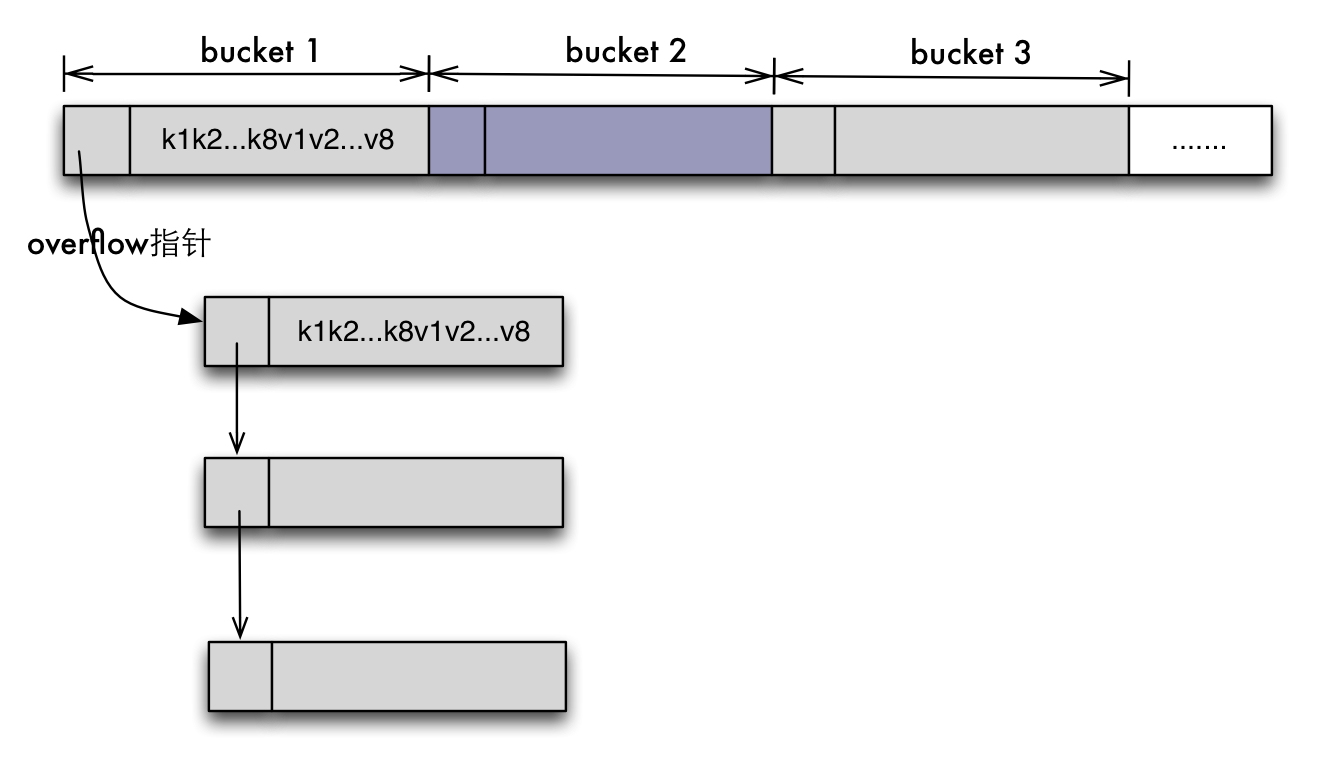
之所以把所有k1k2放一起而不是k1v1是因为key和value的数据类型内存大小可能差距很大,比如map[int64]int8,考虑到字节对齐,kv存在一起会浪费很多空间。
map相关操作
map初始化
B的初始大小是0,若指定了map的大小hint且hint大于8,那么buckets会在make时就通过newarray分配好,否则buckets会在第一次put的时候分配。随着hashmap中key/value对的增多,buckets需要重新分配,每一次都要重新hash并进行元素拷贝。所以最好在初始化时就给map指定一个合适的大小。
makemap有h和bucket这两个参数,是留给编译器的。如果编译器决定hmap结构体和第一个bucket可以在栈上创建,这两个入参可能不是nil的。
1 | // makemap implemments a Go map creation make(map[k]v, hint) |
map存值
存储的步骤和第一部分的分析一致。首先用key的hash值低8位找到bucket,然后在bucket内部比对tophash和高8位与其对应的key值与入参key是否相等,若找到则更新这个值。若key不存在,则key优先存入在查找的过程中遇到的空的tophash数组位置。若当前的bucket已满则需要另外分配空间给这个key,新分配的bucket将挂在overflow链表后。
1 | func mapassign1(t *maptype, h *hmap, key unsafe.Pointer, val unsafe.Pointer) { |
hash Grow扩容和迁移
在往map中存值时若所有的bucket已满,需要在堆中new新的空间时需要计算是否需要扩容。扩容的时机是count > loadFactor(2^B)。这里的loadfactor选择为6.5。扩容时机的物理意义的理解 在没有溢出时hashmap总共可以存储8(2^B)个KV对,当hashmap已经存储到6.5(2^B)个KV对时表示hashmap已经趋于溢出,即很有可能在存值时用到overflow链表,这样会增加hitprobe和missprobe。为了使hashmap保持读取和超找的高性能,在hashmap快满时需要在新分配的bucket中重新hash元素并拷贝,源码中称之为evacuate。
overflow溢出率是指平均一个bucket有多少个kv的时候会溢出。bytes/entry是指平均存一个kv需要额外存储多少字节的数据。hitprobe是指找到一个存在的key平均需要找多少次。missprobe是指找到一个不存在的key平均需要找多少次。选取6.5是为了平衡这组数据。
| loadFactor | %overflow | bytes/entry | hitprobe | missprobe |
|---|---|---|---|---|
| 4.00 | 2.13 | 20.77 | 3.00 | 4.00 |
| 4.50 | 4.05 | 17.30 | 3.25 | 4.50 |
| 5.00 | 6.85 | 14.77 | 3.50 | 5.00 |
| 5.50 | 10.55 | 12.94 | 3.75 | 5.50 |
| 6.00 | 15.27 | 11.67 | 4.00 | 6.00 |
| 6.50 | 20.90 | 10.79 | 4.25 | 6.50 |
| 7.00 | 27.14 | 10.15 | 4.50 | 7.00 |
| 7.50 | 34.03 | 9.73 | 4.75 | 7.50 |
| 8.00 | 41.10 | 9.40 | 5.00 | 8.00 |
但这个迁移并没有在扩容之后一次性完成,而是逐步完成的,每一次insert或remove时迁移1到2个pair,即增量扩容。增量扩容的原因 主要是缩短map容器的响应时间。若hashmap很大扩容时很容易导致系统停顿无响应。增量扩容本质上就是将总的扩容时间分摊到了每一次hash操作上。由于这个工作是逐渐完成的,导致数据一部分在old table中一部分在new table中。old的bucket不会删除,只是加上一个已删除的标记。只有当所有的bucket都从old table里迁移后才会将其释放掉。
hasmap的删除
map 不会收缩 “不再使用” 的空间。就算把所有键值删除,它依然保留内存空间以待后用。如果一个非常大的map里面的元素很少的话,可以考虑新建一个map将老的map元素手动复制到新的map中。
1 | func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) { |